Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно - чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов - эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают - роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно - зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять - что же они умеют? Нет. Начнем.
Рассмотрим образцы
Среди промышленных роботов широко известна продукция таких фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа - гибрид робота и 3D-принтера.Конечно, любой 3D-принтер обладает признаками робота, но тут - это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” - “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления - все говорит нам о том, что у этого аппарата и его потомков большое будущее. 3D Systems - Figure 4
Figure 4 компании 3D Systems - модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.
Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут - в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus - полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.Принтер также роботизирован - снабжен системой автоматической загрузки, удаления и переработки печатного порошка.Можно с уверенностью сказать, что комплексный подход к 3D-печати - часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon - Carbon SpeedCell
Carbon SpeedCell - технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.
CLIP - технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует - это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI - LASERTEC 65 3D
Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением - пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка - все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS - Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности - этот манипулятор создан по примеру хобота слона.Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например - из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:Также компания спонсирует и представляет проект Roboy - это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog - M Line Factory
Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект - M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл - от загрузки проекта в память, до выхода готового изделия на склад, - без необходимости вмешательства оператора.
Additive Industries - The MetalFAB1 Единственная в своем роде установка - единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически - готовый цех металлической 3D-печати в одном корпусе.Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.Вот так с этим справляется упомянутый выше Sawyer:Выводы:
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих - они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде - многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, - но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Мы привыкли считать, что человек – венец творения. Стоя на верхней ступени эволюции, он приспособился использовать природные ресурсы для своих целей, и вот пещерный охотник, который недавно ставил капкан для мамонта, уже исследует космос.
Но чем шире размах – тем больше требуется ресурсов. Со временем человечество стало поручать рутинную и тяжелую работу компьютерным алгоритмам. Сегодня применение роботов в современном мире уже никого не удивляет.
На плечи механических друзей ложится множество разнообразных задач. Медицина, банковское обслуживание, промышленность, даже развлечения – основные области применения роботов. Однако с каждым годом появляется все больше работы, которая по зубам искусственному интеллекту.
Примеры использования роботов в различных сферах деятельности
Медицина
Здравоохранение – одна из самых прогрессивных сфер, в которой применяется труд роботов. В настоящее время активно развивается роботизированная хирургия.
Так весной 2017 года в Московском клиническом научном центре была проведена успешная операция на желудке 77-летней пациентки под руководством доктора из Южной Кореи Янга Ву Кима. Уникальность события в том, что большую часть манипуляций в брюшной полости онкобольной произвел медицинский робот.
Благодаря кибернетическим технологиям человек может вернуть утраченную часть тела.
Всем известный голливудский киборг Робокоп еще в XX веке казался невероятным футуристическим изобретением. Однако будущее уже наступило. Благодаря кибернетическим технологиям человек может вернуть утраченную часть тела.
В медицине достигнут большой прорыв с тех пор, как стали использоваться бионические протезы, которыми человек может управлять при помощи собственной нервной системы.

После ампутации конечности в организме остаются двигательные нервы, и хирург прикрепляет их остатки к небольшому участку крупной мышцы. Например, если была утрачена рука, нервы перемещают в область грудной мыщцы.
Далее происходит самое интересное: человек хочет вытянуть руку, мозг направляет сигнал мышце с присоединенным нервом. Электроды фиксируют сигнал и отправляют импульс по проводам в процессор внутри протеза руки.
Более того, при помощи протеза человек может чувствовать прикосновение, тепло и давление.

Сегодня кибернетические технологии помогают обрести зрение!
В июне 2017 года слепоглухому 59-летнему россиянину успешно имплантировали кибернетическую сетчатку. Устройство показывает картинку из пикселей, и пациент видит окружающие предметы в виде черно-белых очертаний, а специальные упражнения позволяют мозгу распознавать их.
Космос
Космороботы активно используются человеком в освоении просторов Вселенной – механизмы собирают образцы почвы и исследуют новые пространства в условиях повышенной радиации и экстремальных температур.

На 2021 год запланирован запуск российского космического робота на МКС – для технического обслуживания аппаратов и работ в открытом космосе.
Системы безопасности
Не менее успешно роботизированные системы применяют в сфере безопасности: устройства со специальными датчиками оперативно обнаруживают пожароопасные ситуации и успешно предотвращают их.
Существуют военные базы, где используют роботов, имитирующих действия противника. Такие тренировочные механизмы могут воспроизводить повадки человека. Помимо этого, существуют разведывательные и боевые модели. Ходят слухи, что российские войска применили роботов во время войны в Сирии.

Производство
Современные заводы и предприятия далеко продвинулась за счет современных технологий. Автоматизированные промышленные роботы применяются для сварки, укладки, покраски и прочих операций, требующих многократного повторения и высокой точности.
Чаще всего такие механические работники представляют собой механизм, напоминающий человеческую руку. Обычно это универсальное устройство с несколькими осями подвижности и фланцем для закрепления рабочего инструмента.

Использование промышленных роботов значительно увеличивает производительность, в то время как человеческие ресурсы освобождаются для более важных задач.
Быт
Если бы вас попросили ответить не задумываясь, в каких областях применяют роботов, вы бы наверняка первым делом представили футуристические пейзажи, на фоне которых андроиды завоевывают космос. Второе, что приходит на ум – более приземленные научные центры, где гуманоидов собирают из деталей, на крайний случай – заводы с механизмами-манипуляторами.

Но роботы гораздо ближе к людям, чем кажется, многие из них успешно используются в быту. Самые распространенные – робот-пылесос, робот-газонокосильщик, а также массажер и даже чистильщик бассейна.
В последнее время пользуется все большей популярностью «умный дом» – автоматизированная сеть, контролирующая электричество, водоснабжение, безопасность и другие системы.
Развлечения
Применение роботов в различных сферах деятельности привело к тому, что многие дети и взрослые сегодня не прочь завести себе механического друга. На прилавках магазинов немало разнообразных детских игрушек (в том числе радиоуправляемых), которые умеют петь, танцевать, рассказывать сказки и даже летать. «Взрослые» игрушки, как правило, сложнее и дороже, зато вызывают восхищение тем, как далеко зашел прогресс.
Один из популярных роботов – англичанин Теспиан – гуманоид, созданный для общения. Кроме того, что Теспиан отличный собеседник, он еще декламирует стихи и умеет разыгрывать театральные постановки, уверенно при этом жестикулируя и отображая смену эмоций на лице.

Порой ученым удается создать настолько неотличимого от человека робота, что возникает эффект «зловещей долины».
Вершина современных разработок – роботы гуманоидного типа. В Китае создали реалистичных андроидов, которые умеют поддерживать беседу и даже шутить. Порой ученым удается изобрести настолько неотличимое от человека создание, что возникает эффект «зловещей долины».
Этот психологический феномен заключается в том, что люди испытывают неконтролируемый страх при виде неживого объекта, который выглядит человекоподобным (в роли объекта может выступать гиперреалистичная скульптура или персонаж в видеоигре).

Точного объяснения причины возникновения этого эффекта до сих пор нет, однако психологи пришли к выводу, что на глубоко подсознательном уровне человек анализирует малейшие отклонения от «нормальности», и симметричное лицо робота-андроида (в отличие от ассиметричных лиц людей) вкупе с «механическими» движениями и рваной безэмоциональной речью может вызвать необъяснимый ужас.
Проведение презентаций
Промороботы используются для обслуживания клиентов. Так 31 августа 2017 года в Сбербанке открылся т. н. «офис будущего», где желающие могли ознакомиться с обновленным сервисом.
Гостей зеленого банка на входе приветствовал проморобот, который отвечал на вопросы, пел и танцевал. Благодаря системе распознавания лиц он также запоминал собеседников, делал фото и даже демонстрировал эмоции на дисплее.

Мы перечислили лишь немногие сферы применения роботов в современном мире, при этом с каждым годом роботизация приобретает все больший масштаб.
Применение роботов в различных областях влечет плюсы и минусы.
Преимущества роботизации:
- wow-эффект – новые технологии встречают с восторгом, роботы вызывают интерес и симпатию (особенно на публичных мероприятиях);
- экономия – использование роботов позволяет оптимизировать работу человеческих ресурсов и сэкономить (при длительном использовании стоимость механизма окупается);
- оптимизация – роботы могут выполнять рутинную и тяжелую работу, в то время как ценные кадры возьмут на себя более сложные аналитические задачи;
- качество – действия роботов исключает негативные последствия человеческого фактора, результат работы механизма будет более точным;
- скорость – темп работы гораздо выше, не требуется время на перерывы и обед.
Недостатки роботизации:
- хрупкость – как и любые другие механизмы, роботы нуждаются в техническом обслуживании и ремонте;
- энергопотребление – работоспособность механизмов полностью зависит от источников питания, и объемы потребления энергии довольно велики;
- безработица – замена кадров роботами может привести к сокращению как синих, так и белых воротничков: в Сбербанке, например, планируют заменить 4,5 тыс. сотрудников искусственным интеллектом (впрочем, старший вице-президент банка обещает, что работники будут переобучены и смогут работать над другими проектами);
- деградация – существует мнение, согласно которому современные роботы и их применение может негативно сказаться на человеке в будущем. Если всю тяжелую (а в дальнейшем – и мыслительную) работу будет выполнять искусственный интеллект, человек может перестать развиваться.
Главное отличие робота от человека
Ты всего лишь машина, только имитация жизни. Робот сочинит симфонию? Робот превратит кусок холста в шедевр искусства (с)
До недавнего времени считалось, что способность к творчеству – уникальная черта , которая отличает искусственный интеллект от человеческого, однако с появлением нейросетей можно смело сказать, что в современном мире роботы «научились» творить.
Разработчик Кристофер Гессе представил проект Edges2cats, который превращает рисунки домов, котов, обуви и сумок в фотографичные изображения.

Что будет дальше?
В настоящее время мы видим, что между человеком и роботом лежит огромная пропасть, однако с каждым годом алгоритмы обучения машин совершенствуются, и вполне может статься, что через несколько десятков лет искусственный разум превзойдет человеческий.
Робототехника - прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Слово «робототехника» (в его английском варианте «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году.
Робот (чеш. robot, от robota - подневольный труд или rob - раб) - автоматическое устройство, созданное по принципу живого организма.
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
“Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.” И. М. Макаров, Ю. И. Топчеев. “Робототехника: История и перспективы”
Внешний вид и конструкция современных роботов могут быть весьма разнообразными. В настоящее время впромышленном производстве широко применяются различные роботы, внешний вид которых (по причинам технического и экономического характера) далёк от «человеческого».
История
Сведения о первом практическом применении прообразов современных роботов - механических людей с автоматическим управлением - относятся к эллинистической эпохе.
Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136-1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.

Чертежи Леонардо да Винчи
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн, скорее всего, основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. Он также изготовил механических уток, которые, как говорили, умели клевать корм и «испражняться».
Виды роботов
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков.

Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Несмотря на их высокую стоимость, численность промышленных роботов в странах с развитым производством быстро растёт. Основная причина массовой роботизации такова:
«Роботы выполняют сложные производственные операции по 24 ч в сутки. Выпускаемая продукция при этом имеет высокое качество. Они… не болеют, не нуждаются в обеденном перерыве и отдыхе, не бастуют, не требуют повышения заработной платы и пенсии. Роботы не подвержены влиянию температуры окружающей среды либо воздействию газов или выбросов агрессивных веществ, опасных для жизни человека».
Медицинские роботы
В последние годы роботы получают всё большее применение в медицине; в частности, разрабатываются различные модели хирургических роботов.
Ещё в 1985 году робот Unimation Puma 200 был использован для позиционирования хирургической иглы при выполнении биопсии головного мозга, проводившейся под управлением компьютера.
В 1992 году разработанный в Имперском колледже Лондона робот ProBot впервые осуществил операцию на предстательной железе, положив начало практической роботизированной хирургии.

Робот Da Vinci
С 2000 года компания Intuitive Surgical серийно выпускает робот Da Vinci, предназначенный для лапароскопических операций и установленный в нескольких сотнях клиник по всему миру.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.

Робот-пылесос iRobot
В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы «Вакамару» производства фирмы Mitsubishi. Робот стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением.
Всё большую популярность набирают роботы-уборщики (по своей сути - автоматические пылесосы), способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п.

Беспилотник
Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли).
В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.

В Технологическом институте Джорджии под руководством профессора Хенрика Кристенсена разработаны напоминающие муравьёв инсектоморфные роботы, способные обследовать здание на предмет наличия там врагов и мин-ловушек (доставляются к зданию «главным роботом» - мобильным роботом на гусеничном ходу).
Получили распространение в войсках и летающие роботы. На начало 2012 года военными во всём мире использовались около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
К роботам-учёным безусловно можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса. С их помощью были открыты т. н. «дверки Гантенбринка» и т. н. «ниши Хеопса». Исследования продолжаются.
Система передвижения
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).

Роботы BigDog
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками.
Также известны роботы, использующие принципы движения живых организмов - змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.

Робот Tuna
Система распознавания образов
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Математическая база

Робот Aibo
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов.
В июне 2009 года ученые Токийского университета представили человекоподобного робота «KOBIAN», способного выражать свои эмоции - счастье, страх, удивление, грусть, гнев, отвращение - с помощью жестов и мимики.

Робот KOBIAN
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Производители роботов
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших - iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводятся выставки роботов, напр. самая крупная в мире International robot exhibition (iRex) (проводится в начале ноября раз в два года в Токио, Япония).
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство
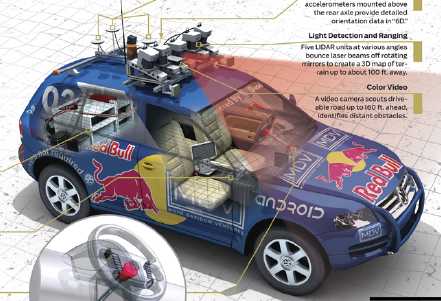
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул

БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

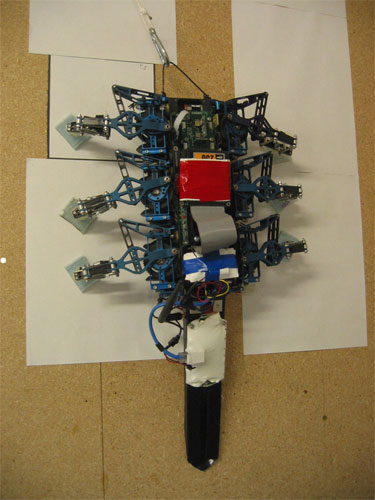
RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Существует множество способов определения различных типов и видов роботов. Как мы видим, возможные разногласия сильно различаются. Основная причина этих различий заключается в том, что разные ученые и преподаватели часто имеют разные взгляды на то, что следует преподавать в рамках «робототехники».
Например, некоторые преподаватели, которые преподают робототехнику, обычно сосредоточены в основном на промышленной робототехнике, полностью игнорируя сервисные роботы. Поэтому, говоря о типах и видах роботов, они обычно говорят о типах промышленных роботов. Для этого есть веская причина: огромное большинство инженеров-роботологов придется заниматься преимущественно промышленными роботами в своей карьере.
Тем не менее, промышленные роботы не единственные. Поэтому, как мы видим, при разделении роботов на типы это разделение должно быть достаточно широким, чтобы включать все, что можно понимать как робот.
Есть два возможных способа, как это можно сделать. Во-первых, вы можете разделить роботов на типы по их приложению, а во-вторых - по пути их перемещения (или нет). Мы признаем, что существуют и другие возможные способы разделения роботов на типы, но, на наш взгляд, эти два являются лучшими. Кроме того, мы предпочитаем использовать обе эти классификации вместе. Таким образом, на два вопроса о роботе уже будет дан ответ: «Что он делает?» и «Как это происходит?»
Типы роботов в Мире
В настоящее время роботы выполняют множество различных задач во многих областях, и количество заданий, возложенных на роботов, неуклонно растет. Вот почему, на наш взгляд, одним из лучших способов разделить роботов на типы является разделение по их приложению.
Какие бывают роботы:
Промышленные роботы.
Промышленные роботы - это роботы, используемые в промышленной производственной среде. Обычно это шарнирные рычаги, специально разработанные для таких применений, как сварка, обработка материалов, окраска и другие. Если мы судим исключительно по спросу, этот тип может также включать некоторые автоматизированные управляемые транспортные средства и другие роботы.
Бытовые роботы.
Бытовые роботы - это роботы, используемые дома. Этот тип роботов включает в себя множество совершенно разных устройств, таких как роботизированные пылесосы, роботизированные очистители для бассейна, подметальные машины, очистители желобов и другие роботы, которые могут выполнять различные обязанности. Кроме того, некоторые роботы наблюдения и телеприсутствия могут рассматриваться как бытовые роботы, если они используются в этой среде.
Медицинские роботы.
Медицинские роботы - это роботы, используемые в медицине и медицинских учреждениях. В первую очередь - хирургические роботы. Кроме того, некоторые автоматизированные управляемые транспортные средства и, возможно, подъем помощников.
Сервисные роботы.
Сервисные роботы - это роботы, которые не попадают в другие типы по использованию. Это могут быть разные роботы сбора данных, роботы, созданные для демонстрации технологий, роботов, используемых для исследований и т.д.
Военные роботы.
Военные роботы - это роботы, используемые в армии. Этот тип роботов включает роботы для уничтожения бомб, различные транспортные роботы, разведывательные беспилотники. Часто роботы, первоначально созданные для военных целей, могут использоваться в правоохранительных органах, поисково-спасательных и других смежных областях.
Развлекательные роботы.
Развлекательные роботы - это роботы, используемые для развлечения. Это очень широкая категория. Он начинается с игрушечных роботов, таких как robosapien или работающего будильника, и заканчивается настоящими тяжеловесами, такими как шарнирные рычаги робота, используемые в качестве симуляторов движения.
Космические роботы.
Мы бы хотели выделить роботов, используемых в космосе, как отдельный тип. Этот тип будет включать в себя роботы, используемые на Международной космической станции, Canadarm, которая использовалась в «Шаттлах», а также марсоходы и другие роботы, используемые в космосе.
Теперь, как вы можете видеть, есть примеры, которые вписываются в более чем один из этих типов. Например, может быть глубоководный исследовательский робот, который может собрать ценную информацию, которая может использоваться в военных целях.
Кинематика роботов и их типы
Как вы понимаете, приложение робота не предоставляет достаточной информации, когда речь идет о конкретном роботе. Например, промышленный робот - обычно, говоря о промышленных роботах, мы думаем о стационарных роботах в рабочей ячейке, которые выполняют определенную задачу. Все в порядке, но если на заводе есть AGV (Automated Guided Vehicle)? Это также роботизированное устройство, работающее в промышленной среде. Поэтому мы предлагаем использовать обе эти классификации вместе.
Итак, есть:
1. Стационарные роботы (в том числе роботизированные рукава с глобальной осью движения)
1.1 Картезианские / козловые роботы
1.2 Цилиндрические роботы
1.3 Сферические роботы
1.4 роботы SCARA
1.5 Сочлененные роботы (роботизированные руки)
1.6 Параллельные роботы
2. Колесные роботы
2.1 Одноколесные (шаровые) роботы
2.2 Двухколесные роботы
2.3 Три и более колесных роботов
3. Легкие роботы
3.1. Двуногие роботы (роботы-гуманоиды)
3.2 Роботы-роботы
3.3 четвероногих роботов
3.4 гексаподобные роботы
3.5 другое количество ножек
4. Плавающие роботы
5. Летающие роботы
6. Мобильные сферические роботы (роботизированные шарики)
7. Рой-роботы
8. Другие..
Хотите узнать о других? Да, есть и другие. Например, змееподобные роботы. Есть много областей исследований, которые занимаются различными инновационными типами роботов. Когда-нибудь они будут очень полезны. Тем не менее, теперь мы будем использовать их под типом «другие».
Конечно, ничего из этого не вырезано в камне, особенно в робототехнике, где все меняется почти ежемесячно в наши дни. Тем не менее, по-нашему, эти типы классификации делают свою работу достаточно хорошо.